


保障航测精度的几个方面
靠近被摄物越近,则精度越高
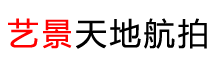
GSD 与飞行高度的关系
客户 A 需要 GSD 为 5cm/pixel的数据,那 GSD 是什么呢?GSD 为地面影像分辨率,是指图像中相邻两个像素中心的距离代表实际距离是多少,飞行高度决定了地面影像分辨率(GSD)。飞行高度与地面影像分辨率成反比,飞行越高地面影像分辨率越低。那他们具体的关系是什么呢?
以大疆精灵 Phantom 4 RTK 为例,像元大小为 2.41微米,相机焦距为 8.8mm,代入公式得H≈36.5*GSD。那客户 A 需要的GSD为5cm/pixel 的数据,通过计算得到的飞行高度约为182米。考虑到飞行时的环境影响,我们一般会低于计算得到的飞行高度去作业,我们可以选取 150 米的飞行高度来确保得到的数据满足客户要求。
精度与飞行高度的关系
客户 C 要的精度不能超过 5cm 指的是什么呢?精度分为相对精度和 精度两种,相对精度指的是在合成的模型上测量的精度,比如要测量模型中道路的长度,测量得到的数据与实际的差异是多少。 精度指的是合成模型上地物的位置与实际位置的差异,比如模型中路灯的位置与实际位置的差异是多少。
以大疆精灵 Phantom4 RTK 为例,在厘米级的定位条件下其相对精度和 精度能达到1~2*GSD。什么意思?比如客户需要相对精度为 5CM 的数据,我们飞行时采用的 GSD 可为2.5~5cm/pixel。为了保证效果,实际飞行时我们可以采用 GSD为 2 cm/pixel,飞行高度约为 73 米进行数据采集。
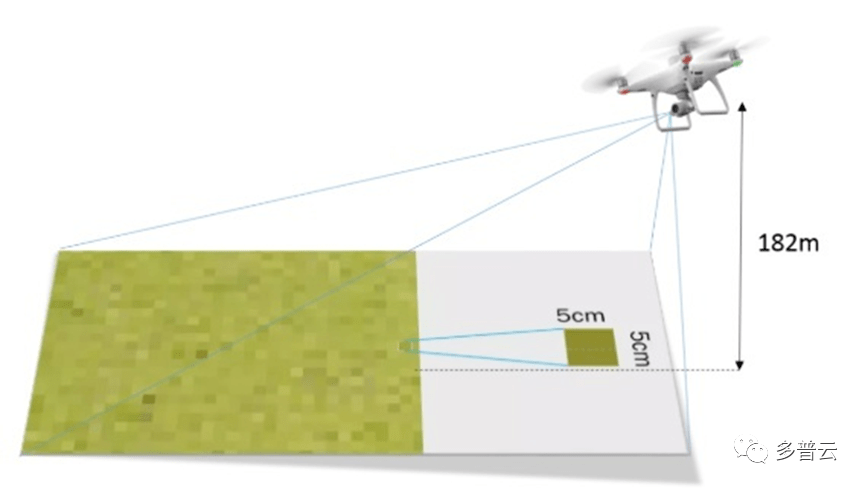
图像精细度与飞行高度的关系
客户 D 说我要能看出电线的模型,那如何能把电线重建出来呢?要重建一个物体,这个物体在图像中要至少占用两个像素。以电线为例,高压线顶上的地线直径约为 1.6cm,那我们拍摄时选取的 GSD 更大 为 0.8cm/pixel。以大疆精灵 Phantom 4 RTK 为例,在飞行时距离电线不要超过 29 米。
武汉多普云科技有限公司出品的贴近摄影测量DPGo软件,是将相机对准这个被摄物剖面摄影,三维重建的模型的也正射投影到这个剖面,能够一定程度的去距离被摄物最近,获取更优 的纹理信息。
比例尺越大,则精度越高
比例尺与飞行高度的关系
客户需要 1:500 比例尺数据,那我们如何设置飞行高度来满足这一要求?GSD 反映了像素与实际距离的关系,比例尺表示图上距离与实际距离的关系。那我需要知道像素与图上距离的关系,才能解决 GSD 与比例尺之间的转换关系。这里我们要引入一个 DPI 概念,DPI 可理解为每英寸的像素数。比如打印地图时,打印机分辨率为 300DPI,那么打印的地图中
1 英寸= 300 个像素1 英寸= 2.54 厘米1 像素=2.54/300 ≈ 0.008467 厘米
如果打印的地图比例尺为 1:500则地图上一个像素代表0.008467*500≈ 4.23厘米
以此类推比例尺为 1:1000 1像素=0.008467*1000≈8.47 厘米比例尺为 1:2000 1像素=0.008467*2000≈16.93 厘米所以当 DPI 为 300 时,可得以下表格

在实际作业中,需要考虑到成图误差,我们选取理论值两倍 GSD 保障作业精度。
提高像控点精度
像控点精度包括像控点的测量精度和像控点影像目标精度。使用GPS测量像控点的精度较高,误差小于5cm,能够满足大比例尺测图的技术要求。像控点影像目标精度取决于影像纹理的丰富度,如果影像纹理较差则内业转点误差至少达到2~3像素。由于无人机航线设计的影像重叠度较高,采用先布设像控点再航拍则内业转点精度可提高至1.5像素以内,可将像控点精度提高至0.1 m,同时也能解决相片控制点布设不均匀问题。
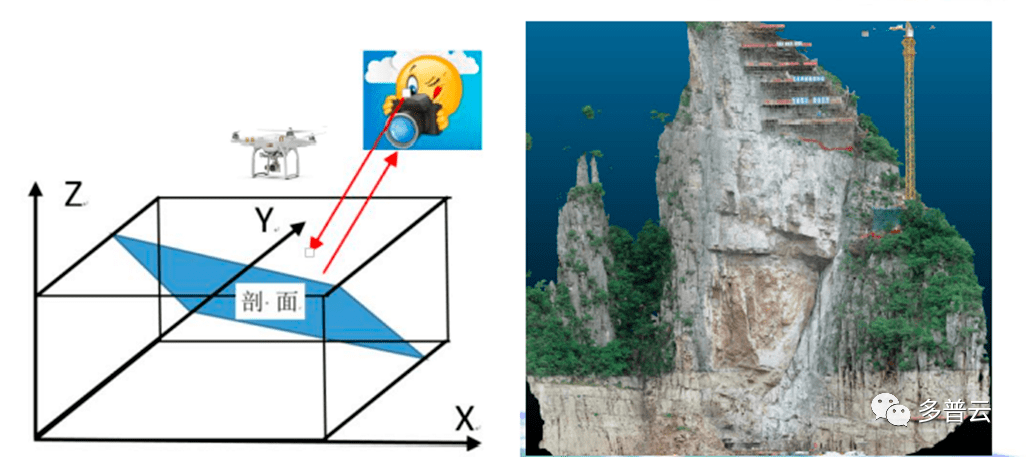
像控点布设的好坏对后期成图起着相当关键的作用,首先,每个架次的至少需要5个相控点。若遇到地形起伏变化较大,数目植被复杂地区需加密像控点,若不加密或者分布不均匀覆盖飞行区域时,会导致翘曲、导致平差数据不能达到精度要求。
像控点的布设的好坏对后期成图起着相当关键的作用,首先,每个架次的至少需要5 个相控点。若遇到地形起伏变化较大,数目植被复杂地区需加密像控点(图1),若不加密或者分布不均匀覆盖飞行区域时,会导致翘曲(图2)、导致平差数据不能达到精度要求。
图1 像控点分布正确方式
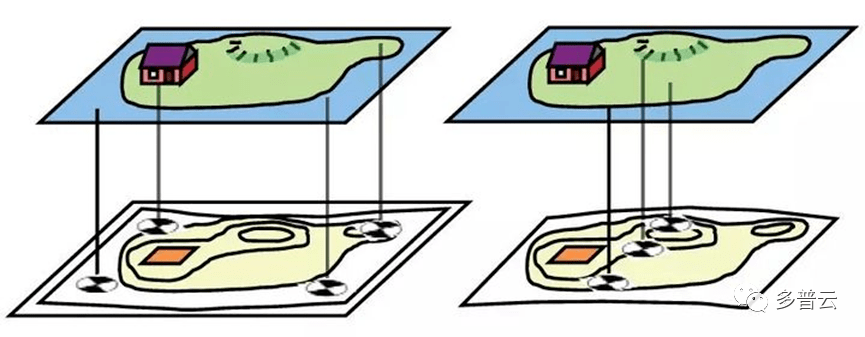
图2 像控点分布错误情况
控制测量是为了保证空三的精度、确定地物目标在空间中的 位置。在常规的低空数字航空摄影测量外业规范中,对控制点的布设方法有详细的规定,是确保大比例尺成图精度的基础。倾斜摄影技术相对于传统摄影技术在影像重叠度上要求更高,现在的规范关于像控点布设要求不适合应用于高分辨率无人机倾斜摄影测量技术。无人机通常采用 GPS 定位模式,自身带有 POS 数据,对确定影像间的相对位置作用明显,可以提高空三计算的准确度。
常规三维建模
基于ContextCapture (Smart3D)算法,从最终空三特征点点云的角度可 以 提 供 一 个 控 制 间 隔,建议值是按每隔20000 ~ 40000 个像素布设一个控制点,其中有差分POS 数据( 相对较 的初始值) 的可 以 放 宽 到40000个像素,没有差分 POS 数据的至少 20 000 个像素布设一个控制点。同时也要根据每个任务的实际地形地物条件灵活应用,如地形起伏异常较大的、大面积植被及面状水域特征点非常少的,需要酌情增加控制点。控制点测量采取附合导线测量方式,获取高精度位置信息。
应急测绘保障
发生地震、山体滑坡、泥石流等自然灾害后,为及时获取灾区可量测三维数据,不能按照传统的作业方式进行控制测量,可通过在 Google 地图读取坐标、手持 GPS 测量、RTK 测量等方式快速获取灾区少量控制点,生成灾区真三维模型,为灾后救援提供帮助。
点位选择要求
影像控制点的目标影像应清晰,选择在易于识别的细小现状地物交点、明显地物拐角点等位置固定且便于量测的地方。条件具备时,可以先制作外业控制点的标志点,一般选择白色( 或者红色) 油漆画十字形标志,并在航摄飞行之前试飞几张影像,确保十字标志能在倾斜影像上正确辨识。控制点测量完成后,要及时制作控制点点位分布略图、控制点点位信息表,准确描述每个控制点的方位和位置信息,便于内业刺点使用。
特别说明① 像点标志
在整个像控布设环节,像控标志类型、尺寸大小及和布设位置至关重要。
①标志的类型首先,从用途来说,像控点是模型成果坐标转换的依据。其反映在技术流程上,外业中,需要实测标志点平面坐标和高程;内业中,在空中三角测量环节,用于像片刺点。因此,像控标志的识别度、反射光的程度、与周边地物色差大小都是需考虑的。除了道路已有交通标志线角点和明显清晰线性地物交点,下图是三类亲测好用的标志类型:

②标志尺寸以无人机的空中视角来说,地面标志相当小,不同分辨率的照片对地面标志的大小要求不同,经实践测试,地面分辨率2-3公分时,地面标志宜在60cmX60cm以上的尺寸,在无人机拍摄的像片上才能清晰可见。
③位置选择以五镜头相机为例,其倾斜角度一般为45度,倾斜视线很容易被遮挡,除了大树、高楼和途径车辆,还会被高茎杂草、电力线所遮盖,当高空拍摄像片时,以像素为单位进行处理,因此,在选择点位时,需避开上述遮挡物。另外,为防止人为破坏,布设可移动标志时还需考虑尽量远离人为活动频繁区域。

特别说明② 布设流程
①像控预布设在项目准备阶段,需要对测区概况有所了解。通常借助卫星图进行像控点位的预布设,秉持“角点布设,中间加密,均匀布设”的原则,设计像控点位。外业中,可通过手机定位实现预设点位“放样”。
②像控实地测设将预先布设的点位,放样至实地,并于电子地图标记位置、拍摄照片作为点之记,以便后续查找、对照和检查。坐标采集多采用RTK获取。
③点位补测在工程实际中,像控标志被人为毁坏或遮盖的情况屡见不鲜,因此需要做好事后点补测工作,保证该处有点,以便构建区域网,达到控制误差累积的效果。
④像控数据检查其一、检查本地坐标点位是否与已有地形图坐标系一致,相对位置关系是否正确。像控坐标成果好坏至关重要,需及时检查,以免坐标系不符合要求或点位、点号错误。 其二、检查像片上是否清晰可见像控标志。如像控标志被遮盖或毁坏的问题,可通过查看对应位置像片,及时检查出来,进而提出外业补救方案
⑤内业刺点刺点,即在多视角、多幅像片上 标记出同名控制点的位置。后续通过空中三角测量解算,将整体坐标纠正至本地坐标系或其它平面坐标系。刺点原则可概括为,“虚实结合像素点、不刺过曝像片、不刺像片边缘”,尽量多镜头像片皆刺点。

提高相机畸变参数精度
无人机搭载的非量测相机影像畸变较大且检校结果不稳定,可通过提高相机畸变参数的精度解决该问题。一是建立三维控制场,及时检测无人机航拍前后的相机畸变参数;二是固定相机镜头,减小相机畸变参数变化对加密成果的影响。
提高影像清晰度
无人机航拍影像清晰度受飞行速度、快门速度、飞行颠簸程度等影响。将无人机飞行速度控制在每小时80km以内、相机快门速度1/120s,可降低影像噪音。
相机的曝光时间选取和天气有着密切的关系,当光线条件不好的时候,应该尽量增加曝光时间,同时在选定的两个曝光时间分别照相,通过相机的ISO 数值进行比较,ISO 数值越小则相片质量越好,所以选择ISO 数值较小。
提升图像质量
影响图像质量的因素分为天气因素与相机本身因素。
天气因素主要是风、雾霾。当风速过大时(不超过5 级),应该考虑停止飞行。首先,风大会造成飞机飞行速度和姿态变化过大,导致从空中所照的照片扭曲程度过大,最终成像模糊。同时会加速飞机动能的消耗,导致缩短飞行时间,最终有可能会在有限的时间内未能完成计划区域。
相机本身因素主要是对相机的像素和曝光时间的,像素主要相机本身决定,曝光时间的选取和天气有着密切的关系,当光线条件不好的时候,应该尽量增加曝光时间,同时在选定的两个曝光时间分别照相,通过相机的ISO 数值进行比较, ISO 数值越小则相片质量越好,所以选择ISO 数值较小照片对应的曝光时间(图3,图4)。

图3 ISO 值为100

图4 ISO 值为1000
合适的重叠率
重叠率是提高相片连接点的重要保障,但是有些时候为了节俭飞行时间或扩大飞行区域,会调低重叠率。重叠率若低,每个地物点仅会在少量航片中显现,在提取连接点的量会很少,相片的连接点少自然会导致飞机的照片连接粗糙,最终导致提取的连接点平差结构弱(见图5,图6)。高的重叠率则可避免上述问题。
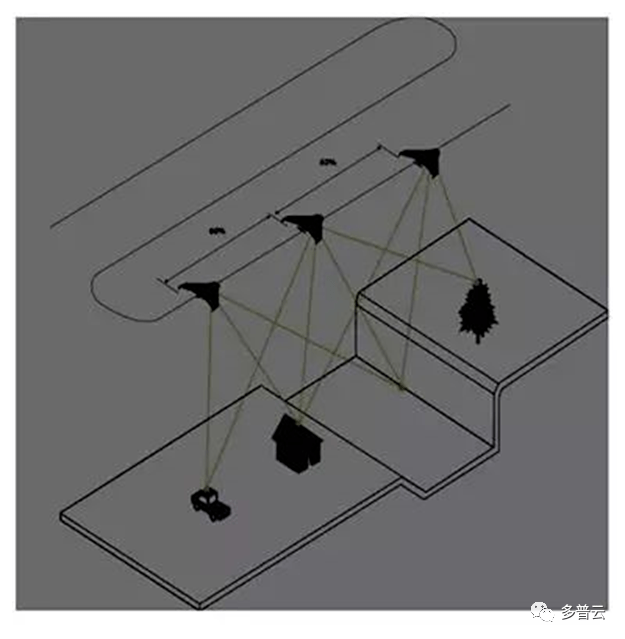
图5 低重合率

图6 高重合率
低空数字航空摄影规范规定“航向重叠度一般应为 60% ~ 80%,最小不小于 53%; 旁向重叠度一般应为 15% ~ 60%,最小不小于 8%”。在无人机倾斜摄影时,旁向重叠度是明显不够的。不论航向重叠度还是旁向重叠度,按照算法理论建议值是 66.7%。可以区分为建筑稀少区域和建筑密集区域两种情况来进行介绍。
建筑稀少区域
考虑到无人机航摄时的俯仰、侧倾影响,无人机倾斜摄影测量作业时在无高层建筑、地形地物高差比较小的测区,航向、旁向重叠度建议更低 不小于70%。要获得某区域完整的影像信息,无人机必须从该区域上空飞过。以两栋建筑之间的区域为例,如果这两栋建筑由于高度对这个区域能形成完全遮挡,而飞机没有飞到该区域上空,那么无论增加多少相机都不可能拍到被遮区域,从而造成建筑模型几何结构的粘连。
建筑密集区域
建筑密集区域的建筑遮挡问题非常严重。航线重叠度设计不足、航摄时没有从相关建筑上空飞过,都会造成建筑模型几何结构的粘连。为提高建筑密集区域影像采集质量,影像重叠度最多可设计为80% ~ 90%。当高层建筑的高度大于航摄高度的1 /4 时,可以采取增加影像重叠度和交叉飞行增加冗余观测的方法进行解决。如 的上海陆家嘴区域倾斜摄影,就是采用了超过 90%的重叠度进行影像采集以杜绝建筑物互相遮挡的问题。影像重叠度与影像数据量密切相关。影像重叠度越高,相同区域数据量就越大,数据处理的效率就越低。所以在进行航线设计时还要兼顾二者之间的平衡。
区域覆盖设计
“航向覆盖超出摄区边界线应不少于两条基线。旁向覆盖超出摄区边界线一般不少于像幅的50%”,这是原规范在航摄区域边界覆盖上的保证,但在无人机倾斜摄影时是明显不够的。理论上,需要目标区域边缘地物能出现在像片的任何位置,与测区中心地区的特征点观测量一样。考虑到测区的高差等情况,可以按照式( 2) 来计算航线外扩的宽度L =H1×tan θ+ H2-H3 ( ) +L1 ( 2)式中,L 为外扩距离; H1 为相对航高; θ 为相机倾斜角; H2 为摄影基准面高度; H3 为测区边缘更低 点高度; L1 为半个像幅对应的水平距离。
2
如何检查航测的精度
无人机航拍照片质量
1 避免无人机航拍影像曝光
影像的曝光过度或不足、影像的重影、散焦与噪点,将严重影响三维建模的质量。
为了避免这类曝光问题、在外出航拍时尽量提前看天气预报,在多云的天气拍摄比大晴天更好,如果必须在晴天拍,更好 选择中午左右使阴影区域最小化。
2 无人机航拍快门选择
拍摄前调试使用最合适的快门、光圈、ISO值。
参数相同点:
都可以调节曝光的明暗度,光圈大、ISO高、快门速度慢都会曝光过亮;
不同点:
光圈可调节景深,小光圈景深大,大光圈景深小;
景深无法通过ISO快门来控制,这就是光圈和ISO快门的区别。
ISO除了明暗调节还有一个特点是降低画质,ISO高了画质就会降低,所以升高ISO在三要素里是最后考虑的,实在不行才提高ISO。
3 其它技术总结
(1)相机感光体CCD的尺寸、焦距以及像素的大小直接影响影像的精度从而影响模型的精度。
(2)在相机参数不变的情况下,无人机飞行高度(曝光点到地物的高度)是决定模型精度高低的关键因素。
(3)在建模的过程中,需要知道相机感光体CCD的尺寸说到传感器的尺寸,其实是说感光器件的面积大小,这里就包括了CCD和CMOS。
感光器件的面积越大,CCD/CMOS面积越大,捕捉的光子越多,感光性能越好,信噪比越高。
(4)传感器尺寸越大,感光面积越大,成像效果越好。
1/1.8英寸的300万像素相机效果通常好于1/2.7英寸的400万像素相机(后者的感光面积只有前者的55%)。
(5)而相同尺寸的传感器像素增加固然是件好事,但这也会导致单个像素的感光面积缩小,有曝光不足的可能。
(6)拍摄好的影像,不要进行任何的编辑,包括改变尺寸、裁剪、旋转、降低噪点、锐化或调整亮度、对比度、饱和度或色调。
(7)CC建模软件不支持拼接的全景图作为原始数据。
(8)飞行过程中的数据会有一定的图像模糊,尤其是旋翼倾斜上使用的普通相机,对于微单相机来说,运动模糊是不可避免的。
运动模糊会导致特征点提取不准,从而:
空三处理中的连接匹配带来很大的影响;
三维重建中的粗匹配产生较大的影响。
(9)模型重建要求连续影像之间的重叠部分应该超过60%,物体的同一部分的不同拍摄点间的分隔应该小于15度。
(10)规划航线拍摄时,建议采集航向重叠度75%以上,旁向重叠度不小于70%的影像。
为实现更好的效果,更好的还原建筑,建议同时采集垂直和倾斜影像。
并同时用小无人机低空采集高空相机拍不到的死角。
(11)尽量选择高分辨率的单反相机,建议2000万像素以上。
避免使用广角鱼眼镜头。
更好 是选择定焦镜头,如果使用变焦镜头,请将该镜头焦距设置成更大 或最小值。
(12)将相机调整为更大 分辨率模式;
ISO值尽量低,否则高ISO会产生噪点;
光圈值足够高(光圈越小越好),以产生足够的景深,背景不要太模糊;
快门速度不应该过慢,否则轻微的动作会造成图像模糊。
(13)避免选择高反光、透明的物体,例如玻璃瓶,镜面等。
如果容易反光的物体,更好 使用柔光灯或在阴天下拍摄,尽可能没有亮点。
(14)避免选择有两面 对称的物体(形状和纹理都对称),例如单色立方体或有对应面一样纹理的立方体。
(15)避免有移动的物体在场景中,要保证被拍摄的背景环境是不变的。
(16)避免 平坦的物体,例如平口盘子等。
避免

